|
I am a first year PhD student in the Robotics Institute at Carnegie Mellon University. I am advised by Katerina Fragkiadaki and my research focuses on robot learning and reasoning, especially for large vision-language action models.
Previously, I recieved my Masters in Computer Science from Georgia Tech (2024) where I was advised by Danfei Xu. I received my BS in EECS and Mechanical Engineering from UC Berkeley (2022). I have also spent time as a Computer Vision intern at the Schlumberger-Doll Research Center (2021) and as a Machine Learning Scientist at Symbotic (2023) |

|
|
My research goal is to improve the quality of life for all people by enabling embodied AI agents to safely and autonomously opperate in our human-centric world. To this end, I work on deep learning for robotics with a focuses on offline policy generation and data driven approaches to human robot interaction. I am interested in learning from large-scale, unstructed, offline datasets as these are the most abundant and accessible sources of data. Developing algorithims that learn effectively from these datasets is a key step towards deployable robotic agents. I am also interested in how we can leverage humans to help robots gather data, learn new skills, and contend with uncertainty. Algorithms that allow for safe and effective human robot collaboration even in the face of out of distribution data are key to the success of future robotic agents.
|
|
Teaching Assistant:
|
|
|

|
Vaibhav Saxena, Matthew Bronars, Nadun Ranawaka Arachchige, Kuancheng Wang, Woo Chul Shin, Soroush Nasiriany, Ajay Mandlekar, Danfei Xu ICLR 2025 Keywords: Imitation Learning, Large Scale Robotic Datasets, OOD Generalization TL;DR: We develope a simulation framework for generating and evaluating common sources of variation in robotics. Through our analysis, we uncover the types of diversity that should be emphasized during future data collection and best practices for retrieving relevant demonstrations from existing datasets. |
|
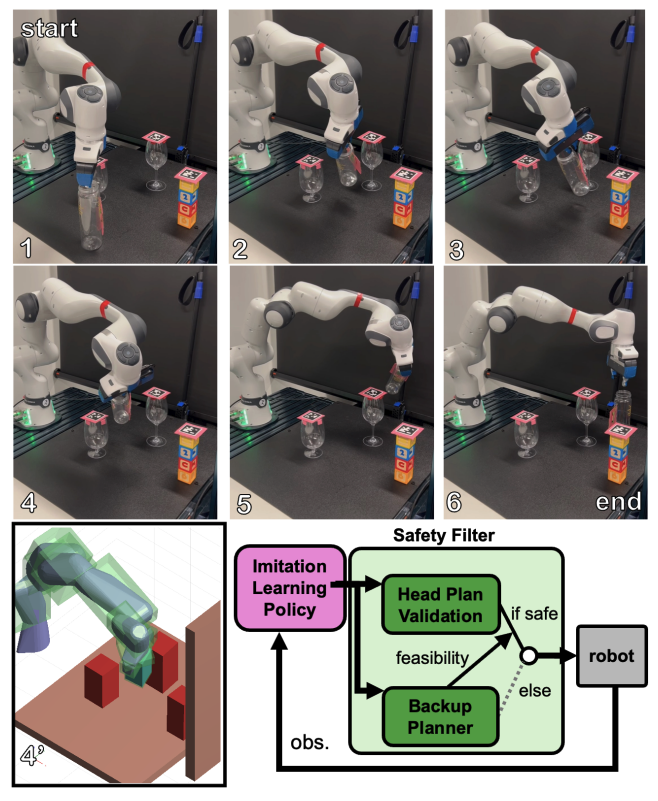
Wonsuhk Jung, Dennis Anthony, Utkarsh A. Mishra, Nadun Ranawaka Arachchige, Matthew Bronars, Danfei Xu, Shreyas Kousik ICRA 2025 Keywords: Diffusion Modeling, Safety Analysis, Imitation Learning TL;DR: We develop a provably safe method of diffusion policy execution by integrating future state prediction and a reachability-based safety filter. |
|
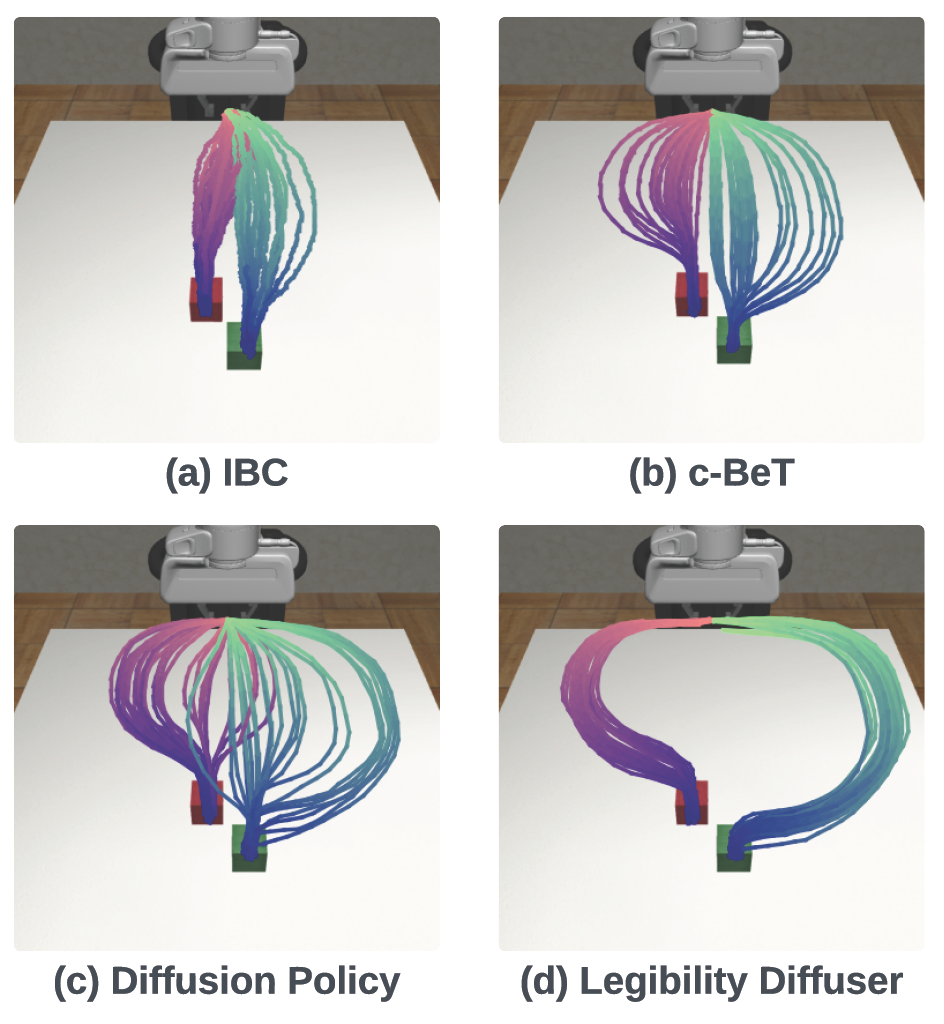
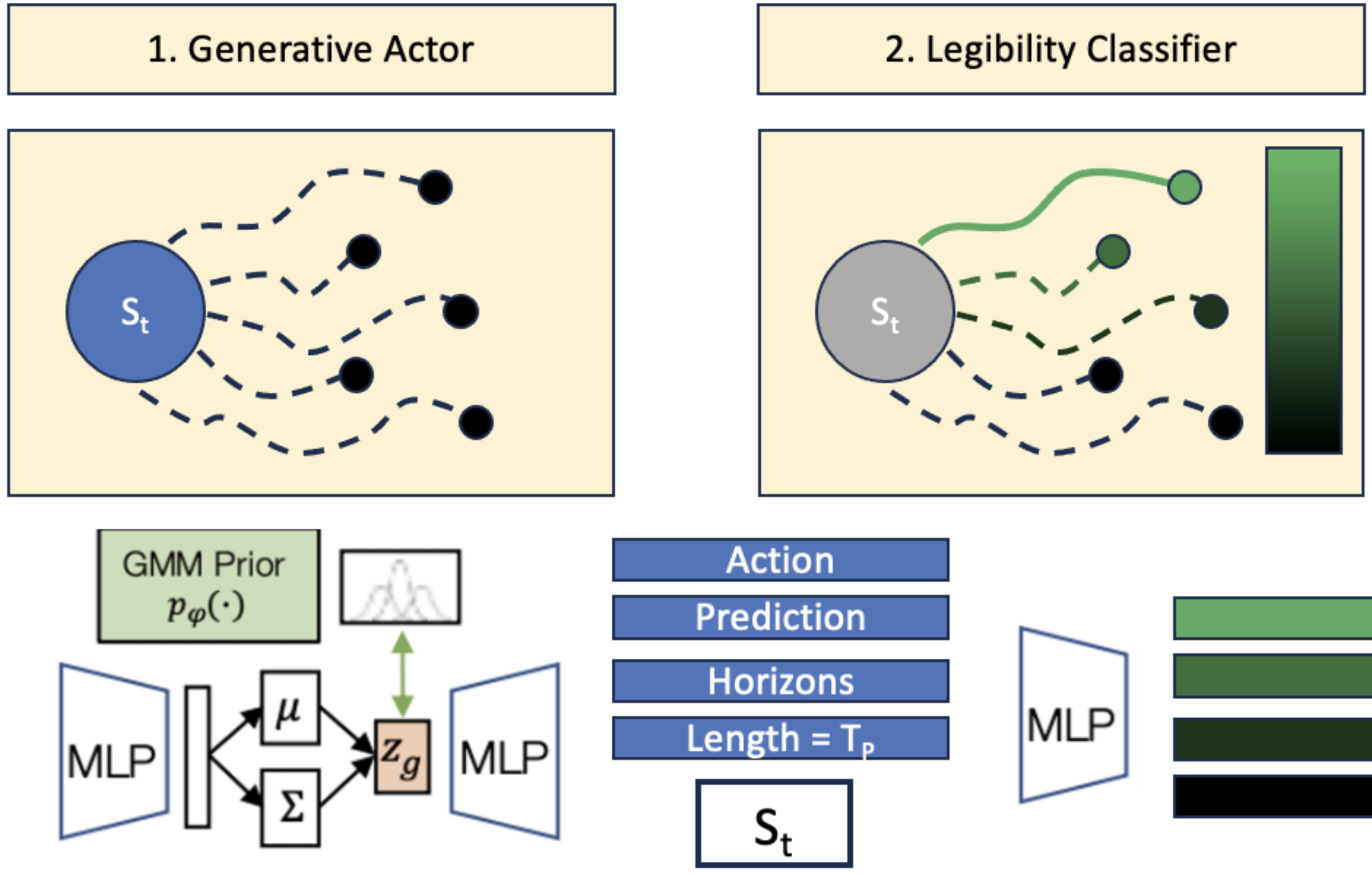
Matthew Bronars, Shuo Cheng, Danfei Xu RA-L 2024 (Presented at ICRA 2025) Keywords: Human Robot Interaction, Diffusion Models,Imitation Learning TL;DR: By leveraging diffusion model guidance, Legibility Diffuser is able to clone the most legible trajectories from a dataset of multi-modal, multi-task human demonstrations. |
|
Sachit Kuhar, Shuo Cheng, Shivang Chopra, Matthew Bronars, Danfei Xu Conference on Robot Learning (CoRL 2023) Keywords: Imitation Learning, Preference Learning, Manipulation TL;DR: Learning to Discern (L2D) is an imitation learning framework for learning from suboptimal demonstrations. By training a quality evaluator in a learned latent space, L2D can generalize to new demonstrators given only a small subset of labeled data. |
|
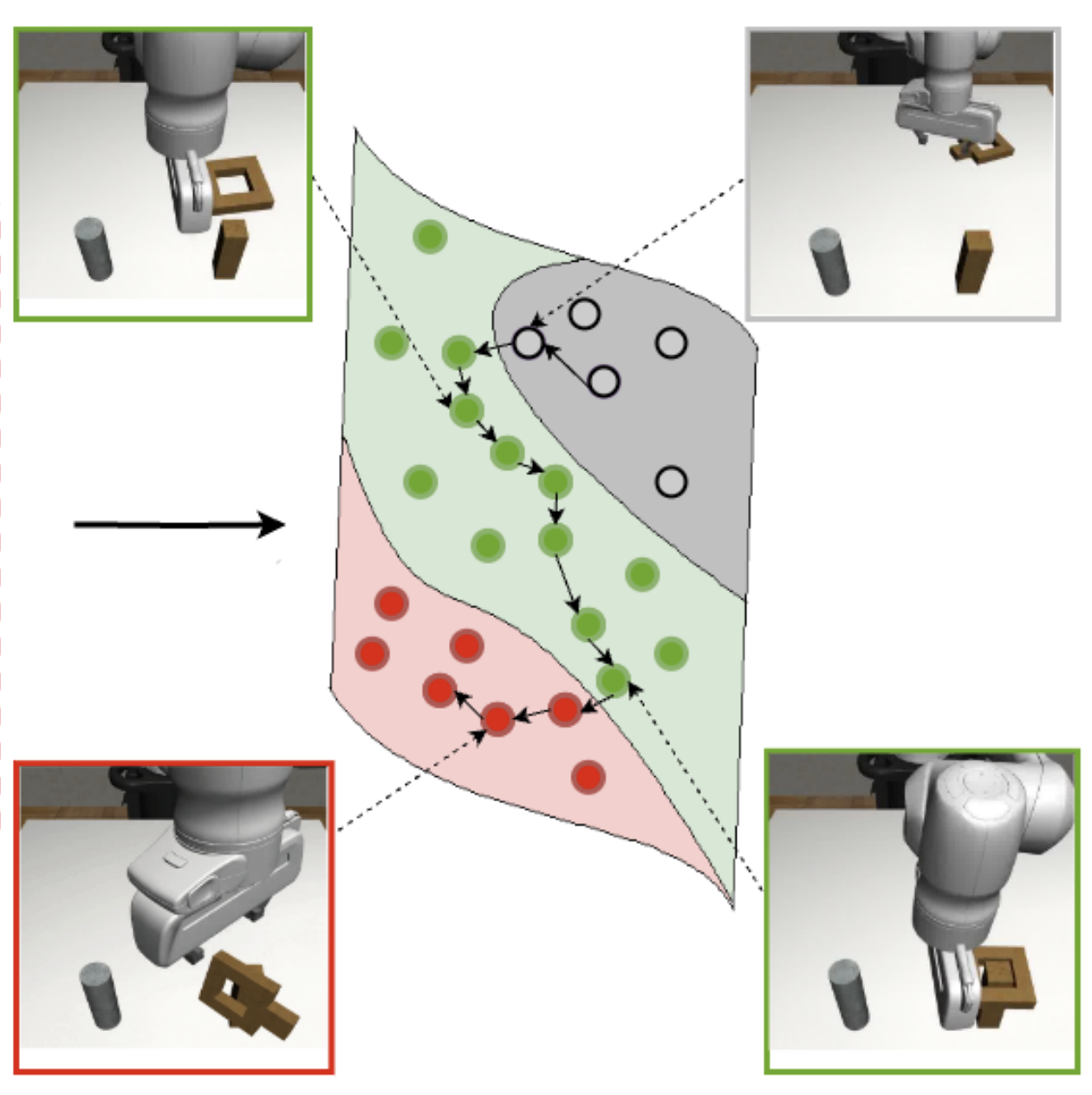
Matthew Bronars, Danfei Xu ICML Workshop on Interactive Learning from Human Feedback (2023) Keywords: Generative Modeling, Human Robot Interaction, Learning from Demonstrations TL;DR: We introduce Generative Legible Motion Models (GLMM), a framework that utilizes conditional generative models to learn legible trajectories from human demonstrations. |
|
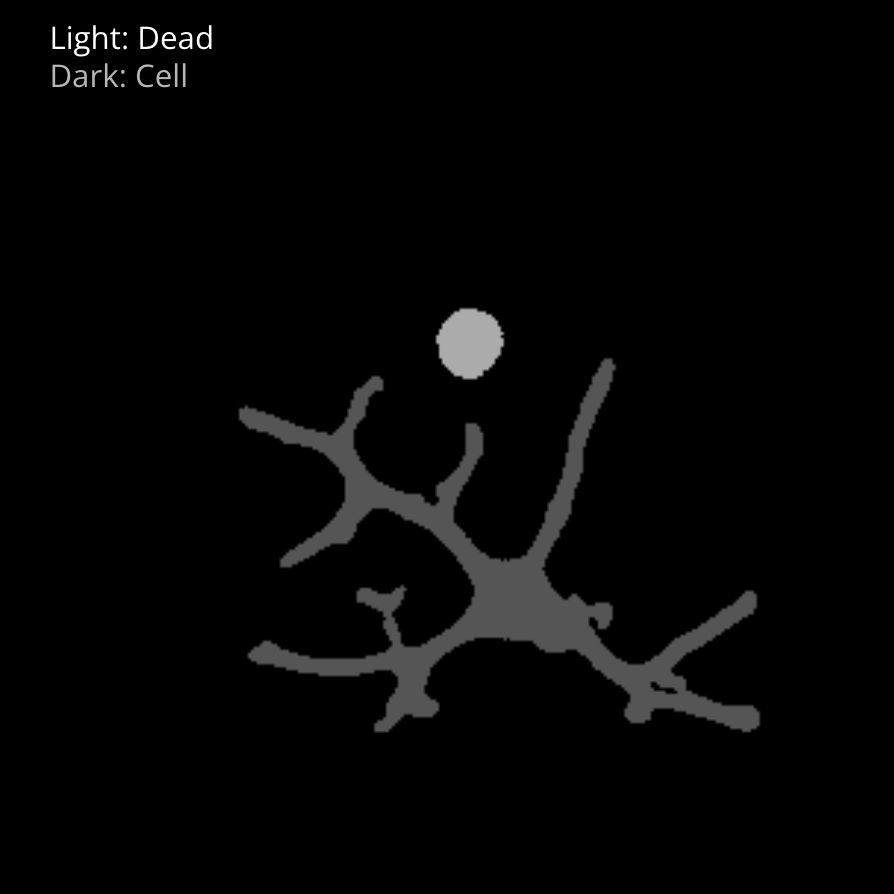
Matthew Bronars, Kristen Cotner, Lydia Sohn UC Berkeley Undergraduate Research Fair, 2021 Keywords: Computer Vision, Image Segmentation, Tracking TL;DR: Trained a U-Net CNN to segment stem cells and wrote a python script to track them through the timelapse. |
|
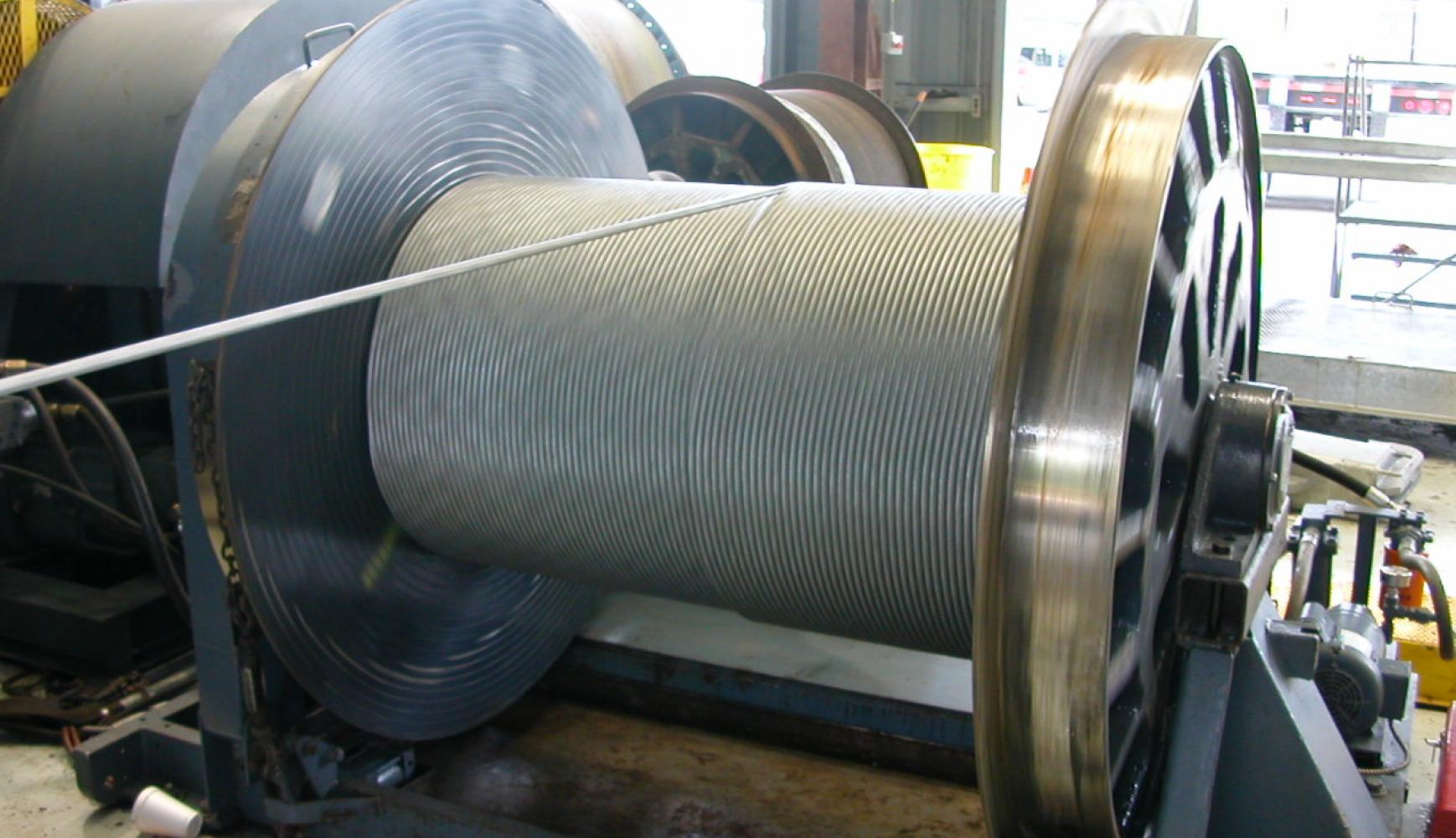
Matthew Bronars, Suraj Raman, Tianxiang Su Schlumberger-Doll Research, 2021 Keywords: Computer Vision, Transfer Learning TL;DR: Designed transfer learning pipeline for implementing cable tracking and damage detection on multiple well sites. *US Patent Pending |

|
Matthew Bronars, Josiah Polhemous UC Berkeley, 2021 Keywords: Mechatronics TL;DR: Designed, built, and programmed a pasta making machine for automated food production. |